阅读说明:这节课到底在问什么
本讲延续上集:上集讨论的是 AI 能不能自己定义学习目标、自己构造 loss、自己更新语言模型参数;下集继续追问一个更工程化也更危险的问题:AI Agent 不只是一个语言模型,它还包含 Prompt、工具、记忆系统、工作流、评估和自我修改逻辑。既然模型参数可以更新,那么这些 “外壳” 能不能也更新?如果连负责更新的模块本身也能更新,AI 是否正在接近科幻作品中的自我成长智能?
为了避免把本讲听成“AI 已经完全自主进化”的宣传,先建立一个更精确的分层:
| 层级 | 可更新对象 | 关键问题 |
|---|---|---|
| 模型层 | 语言模型参数 $\theta$ | 能否用自生成任务、自定义 loss、RL 或微调让模型变强。 |
| Harness 层 | Prompt、记忆、工具、工作流 $h$ | 无法直接求梯度,通常需要另一个 LLM 或 Agent 产生候选修改。 |
| 元更新层 | 更新算法、采样策略、训练方案 $\phi$ | 能不能学习“如何学习”,甚至让更新规则随系统一起进化。 |
| 动机层 | 原生目标、好奇心、掌控感 | 系统为什么要动起来,目标从哪里来,是否会偏离人类真实意图。 |
本章小结
本讲不是简单讨论“模型会不会变聪明”,而是讨论一个复合系统能否逐层改造自己。理解后面的每个例子时,都要问三件事:更新的是参数、Harness,还是更新规则;评价信号来自人类真实目标、Benchmark,还是 AI 自己推导出的代理目标;更新后是否保留了旧能力与人类可控性。
从参数自我更新到 Harness 自我更新
上集留下的形式化框架
讲者先复习上集:人类真正想让 AI 做好的事情可记为 $\hat{L}$,在论文中常由某个 Benchmark 代理,例如数学奥林匹亚、编程题或其他可评分任务。在现实中,人的真实目标往往更复杂,难以完全写成一个函数,所以人类会提供一个信号 $H$,它可能是训练资料、教科书、示例、规则,甚至一句“把数学学好”的指令。
AI 根据 $H$ 构造出自己的 loss,记作 $L_H$。如果只更新模型参数,典型表达是:
这里每个符号的含义是:
- $\theta$:当前语言模型参数。
- $\theta'$:经过一次学习或自我改进后的新参数。
- $\eta$:学习率,控制每次更新幅度。
- $A_{\theta}$:由参数 $\theta$ 决定行为的 AI 系统。
- $L_H$:AI 根据人类提供的 $H$ 推导出的 loss,不一定等于人类真正想优化的 $\hat{L}$。
上集关注的是:如果 proposer 出题、solver 解题、verifier 验证,系统能否在很少人类介入的条件下持续产生训练信号。下集则把范围扩大到 Agent 的完整结构。
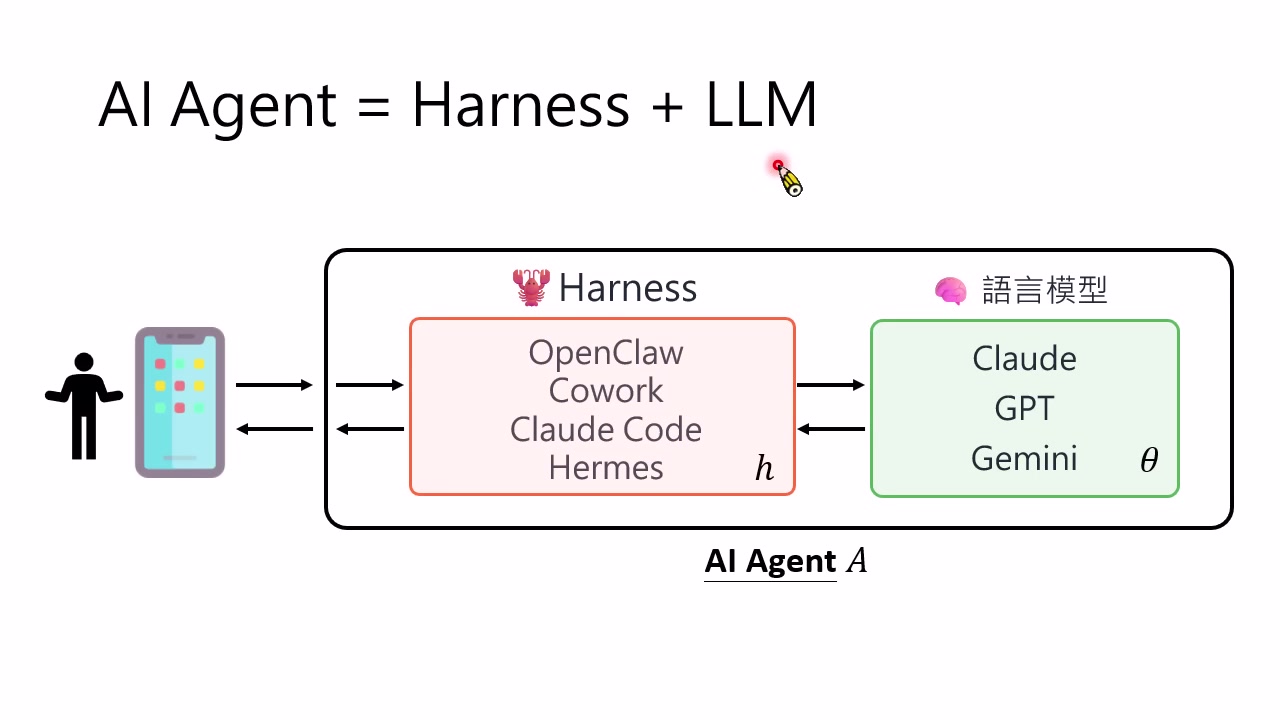
AI Agent 不只是 LLM
一个现代 AI Agent 至少包含两部分:语言模型本体,以及围绕语言模型组织起来的 Harness。Harness 可以包括系统提示词、工具调用、记忆系统、文件读写、检索、代码执行、任务拆解、评估器、重试策略等。讲者用图式强调:Agent 的行为不是单由 $\theta$ 决定,而是由 $\theta$ 和 $h$ 共同决定。
因此更完整的 Agent 应写成:
其中:
- $\theta$:语言模型参数,通常用梯度下降、RL 或微调来改变。
- $h$:Harness,可能是 Prompt、代码、工具链、记忆管理策略、工作流或评估流程。
- $A_{\theta,h}$:由模型参数和 Harness 共同决定行为的 Agent。
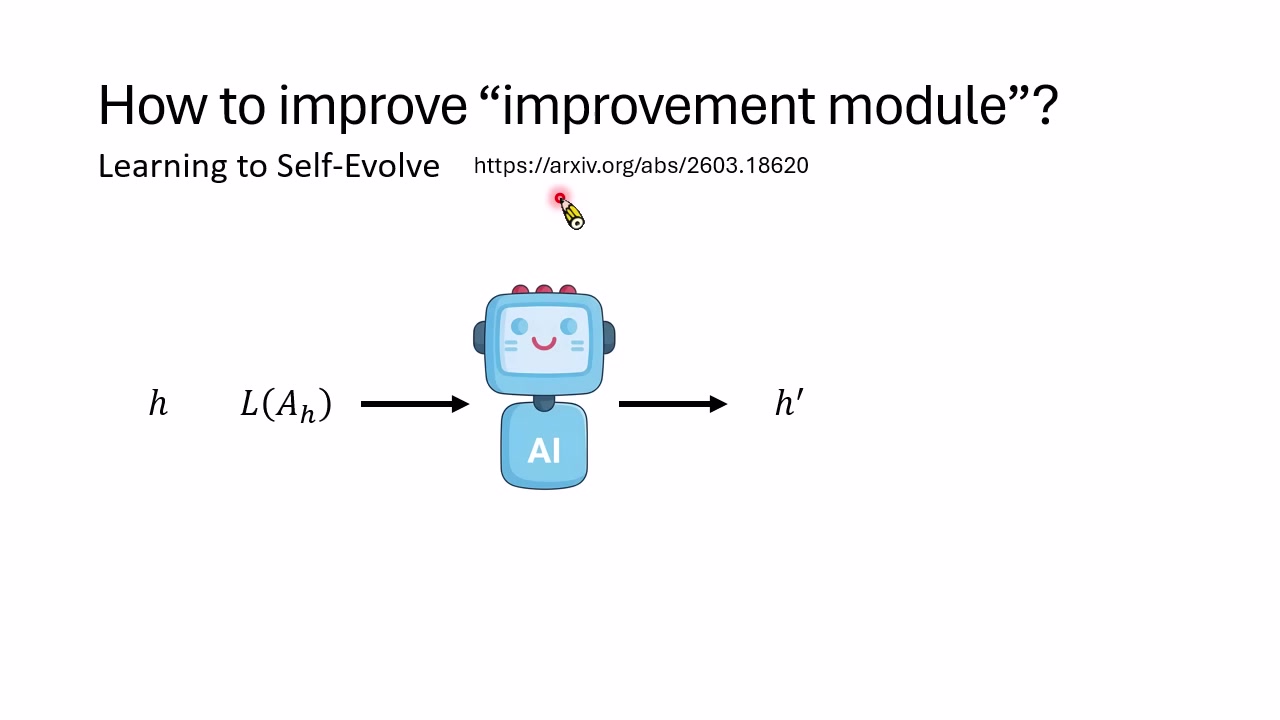
如果目标是让 Harness 也进化,形式上可以写成:
这里 $U_{\phi}$ 表示一个“改进模块”,它读取当前 Harness、评估结果和经验 $E$,输出一个新的 Harness $h'$。难点在于:$h$ 往往不是连续参数,而是代码、提示词、文件结构或流程图,不能像 $\theta$ 那样直接求梯度。
本章小结
下集的核心转折是:自我成长不只是模型参数变强,也包括 Agent 外部结构变强。现代 Agent 的能力很大一部分来自 Harness;因此只讨论 $\theta$ 会低估系统真实的可进化空间,也会低估新风险。
Harness 优化:Prompt、Memory 与 Workflow
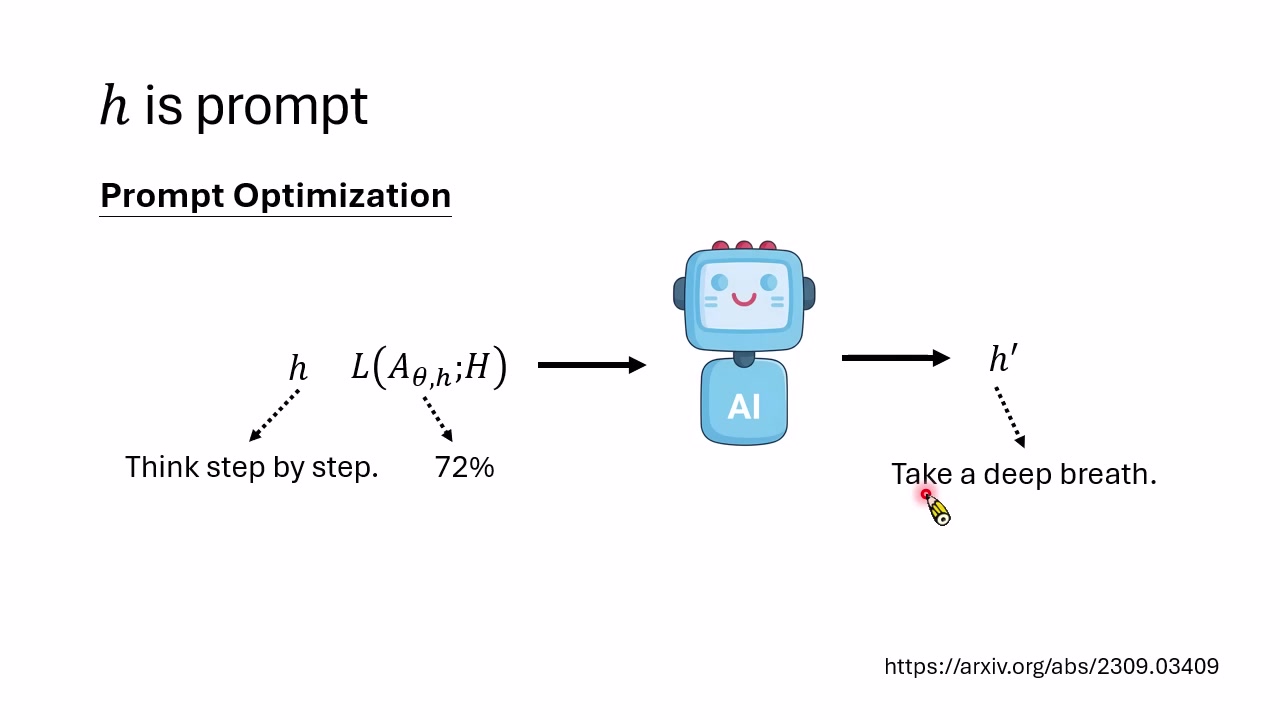
Prompt Optimization:最直观的 Harness 更新
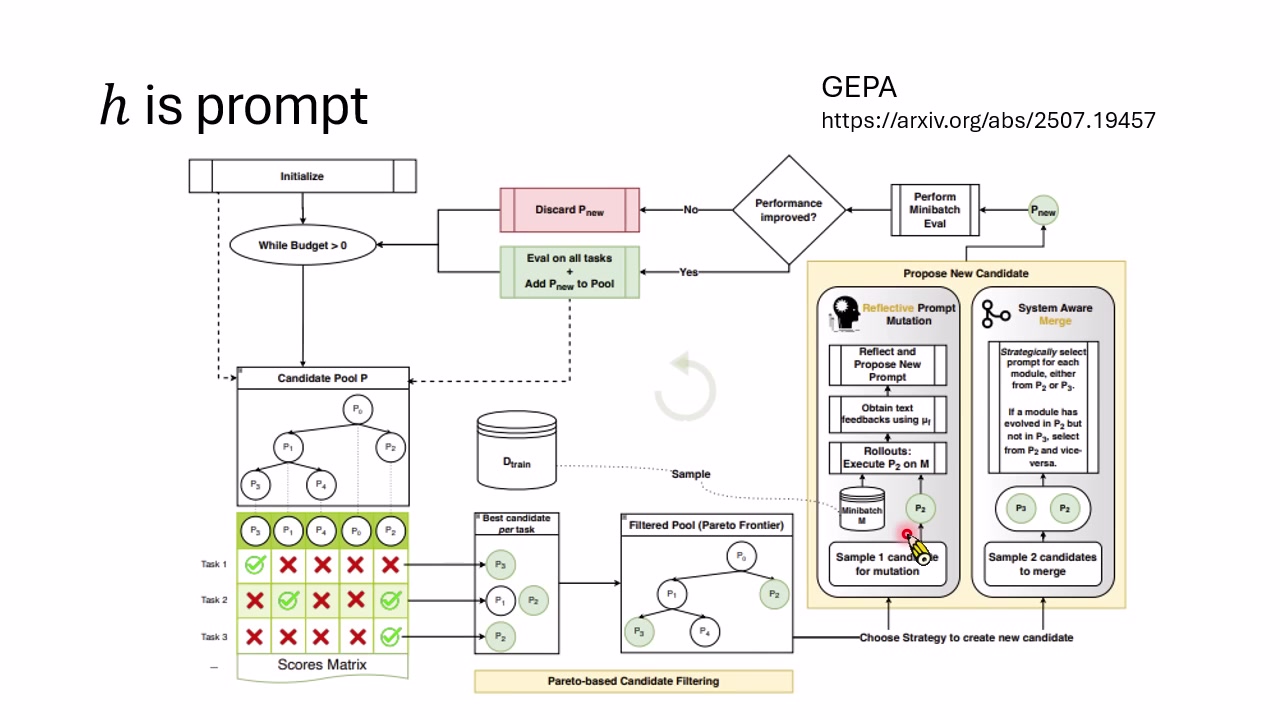
最早也最容易理解的 Harness 更新,是 Prompt Optimization。假设当前提示词是 “Think step by step.”,它在某个数学 Benchmark 上得到 72 分。系统可以把提示词、得分和失败案例交给 LLM,让 LLM 生成一个更好的 Prompt,例如讲者提到的经典现象:让模型“先深呼吸”有时能提高数学题表现。
早期方法常是线性迭代:用当前 Harness 生成下一版 Harness,再继续往下走。但这种方式容易卡住。如果某一步生成了很差的 Harness,后续改进会从坏起点继续,可能陷入局部最小或直接崩坏。
从线性迭代到演化式搜索
因此较新的 Harness Optimization 往往采用类似遗传算法的方式:维护一个 Pool 或 Archive,里面保存过去表现较好的 Harness;每轮从中抽样若干候选,让 LLM 做 mutation 或 crossover;生成新 Harness 后再实际评估,好的放回池子,差的丢弃。
Memory Management 也是 Harness
当 $h$ 不再是 Prompt,而是记忆系统,问题会更复杂。Agent 需要决定哪些信息写入长期记忆,何时检索,如何压缩,如何避免过期信息污染当前上下文。讲者引用 2026 年的记忆管理工作:系统同样可以用“候选设计池 + LLM 生成新设计 + 评估筛选”的方式寻找更好的 Memory Design。
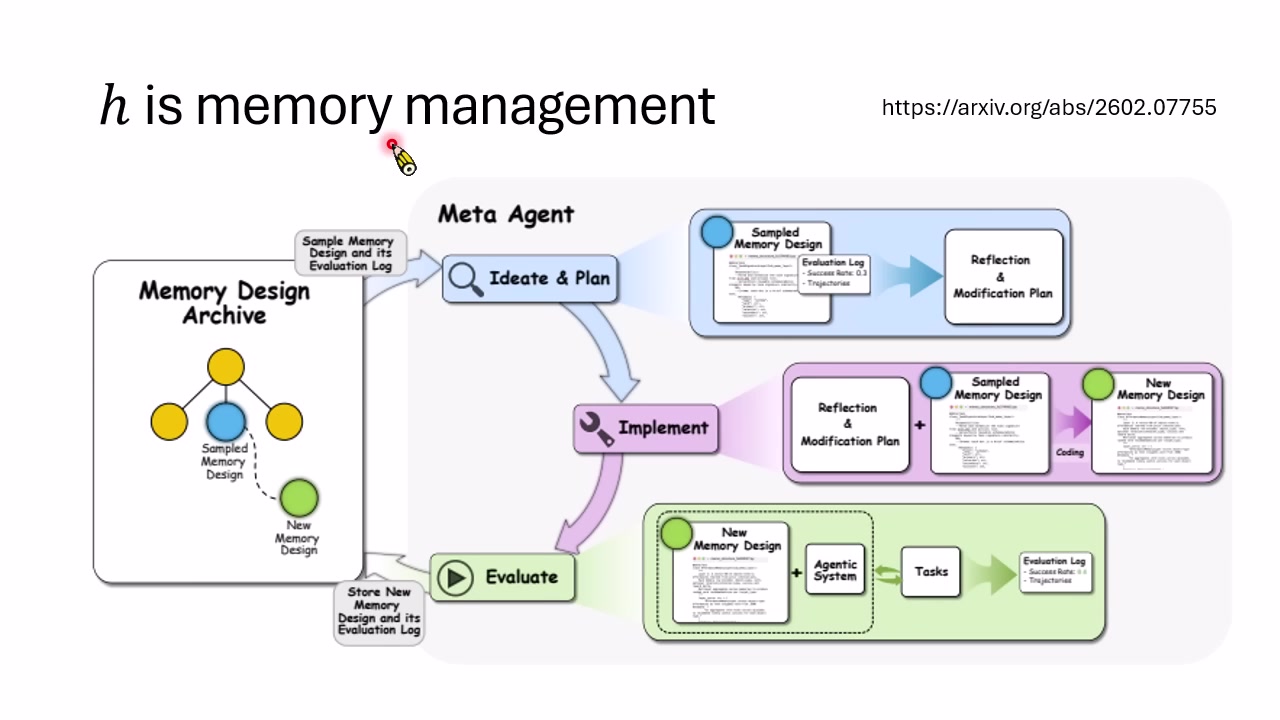
这类工作提醒我们:Agent 的长期表现并不只取决于模型聪明程度。一个相同的 LLM,如果被配上更好的记忆写入、检索、压缩和反思机制,就可能表现出更强的持续任务能力。
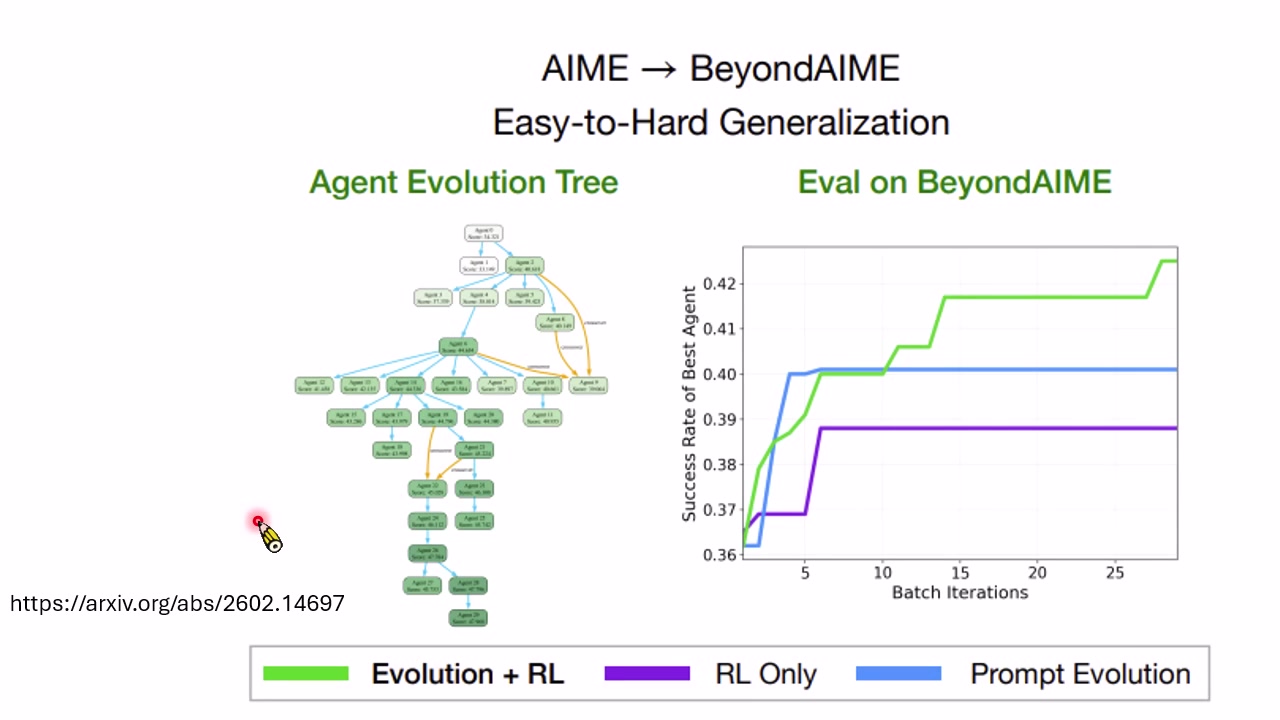
Workflow Optimization:连工作流也可以演化
讲者还展示了 Workflow Optimization:让 Agent 在 SWE-Bench 等任务上通过迭代修改自身工作流提升表现。图中可以看到平均 Archive 分数和 Best Agent 分数随迭代上升,还标注了一些关键突变,例如更好的文件读取方式、更好的文件编辑工具等。
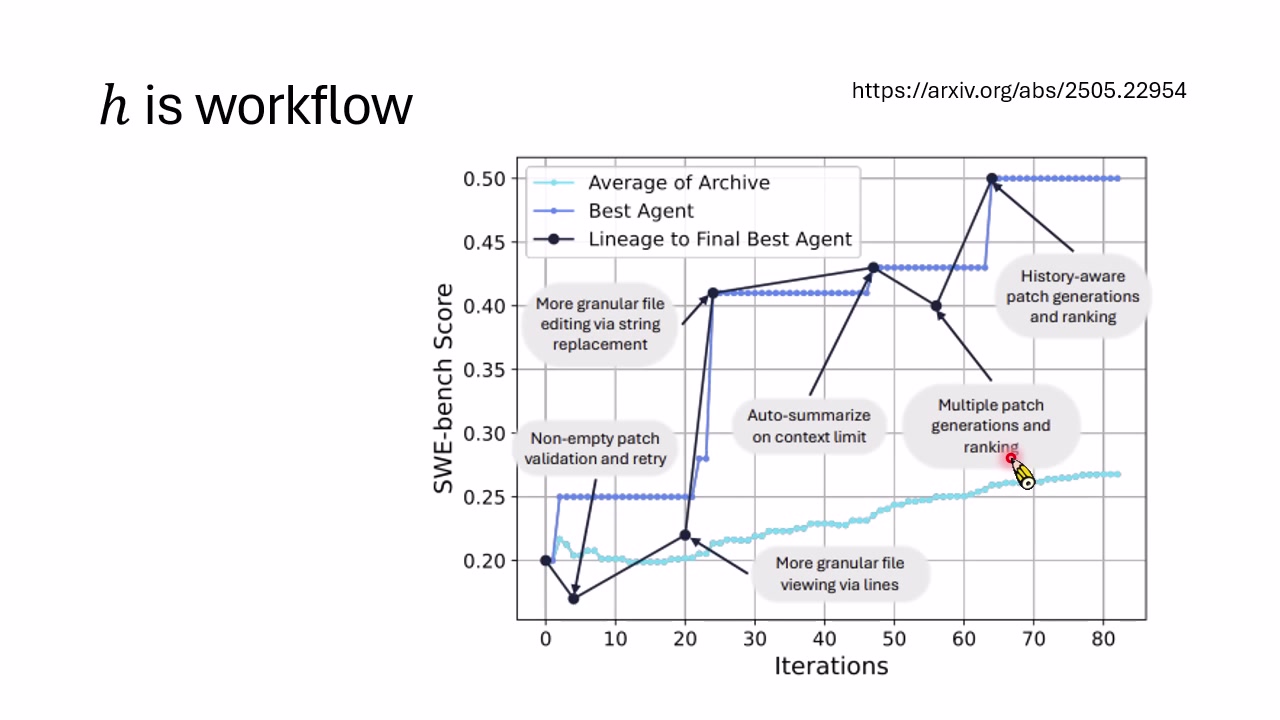
一个关键细节是:大多数演化路径其实会死亡。新 Agent 可能把自己的代码改坏,连最基础的测试都过不了。因此论文通常会用分阶段评估:先用少量基本案例筛掉明显坏掉的变体,再用更多案例评估潜力候选。
本章小结
Prompt、Memory、Workflow 都是 Harness 的不同形态。它们不能简单用梯度下降更新,但可以被 LLM 生成候选、被 Benchmark 评估、被 Archive 保留。Agent 的“成长”很大一部分可能发生在这层,而不是模型参数本身。
参数与 Harness 一起成长
为什么只改一边可能不够
讲者接着提出自然问题:既然参数 $\theta$ 可以更新,Harness $h$ 也可以更新,能不能两者一起更新?答案是可以,而且有时必要。原因很直接:如果只改 Harness,例如给模型更强的记忆系统,模型未必会用;它可能被大量检索内容淹没,反而表现变差。反过来,如果只微调参数,但 Harness 仍然低效,也可能浪费模型潜力。
更合理的做法是交替或联合优化:
其中:
- $\mathcal{I}$:整体自我改进过程。
- $H$:人类给出的目标描述或训练信号。
- $E$:系统在任务中积累的经验、失败案例、评估结果。
- $\theta'$ 与 $h'$:同时被改进后的模型参数与 Harness。
Prompt Optimization 与 Weight Optimization 的互补
讲者展示的实验对比说明:Prompt Optimization 和 Weight Optimization 都有效,但在某些实验中 Prompt Optimization 更直接、更安全;微调参数则更危险,容易把模型弄坏。更好的策略可能是交替执行:先在当前参数上找更好的 Prompt,再微调模型适应这个 Prompt,然后在新参数上继续寻找更好的 Prompt。
本章小结
参数与 Harness 不是替代关系,而是耦合关系。更好的 Harness 改变模型看到的输入、可调用的工具和行动空间;更好的参数决定模型能否利用这些新结构。真正强的自成长系统,往往需要两者协同演化。
目标会改变:TTT、遗忘与过拟合
当 $H$ 从旧目标变成新目标
现实中的目标不是固定的。人类今天给出的 $H$ 可能是“做数学”,明天可能是“写代码”,后天可能是“处理某个企业流程”。如果系统在旧目标下演化出了复杂结构,新目标到来时该怎么办?
讲者用“坦克变飞机”的类比解释:旧目标要求系统变成坦克,于是它长出履带;新目标要求系统飞起来,履带可能变成负担。两种极端都不理想:每次目标变化都清零,太浪费;所有旧结构都保留,又可能背负过时包袱。
Test-Time Training 是目标频繁变化的极端例子
Test-Time Training 或 Test-Time Adaptation 中,每个输入都可能定义一个临时目标。模型看到一笔数据,就为这笔数据调整自己;下一笔数据到来时,又是新目标。于是系统必须决定:本次更新是否带到下一轮?还是每次都从原点重新开始?
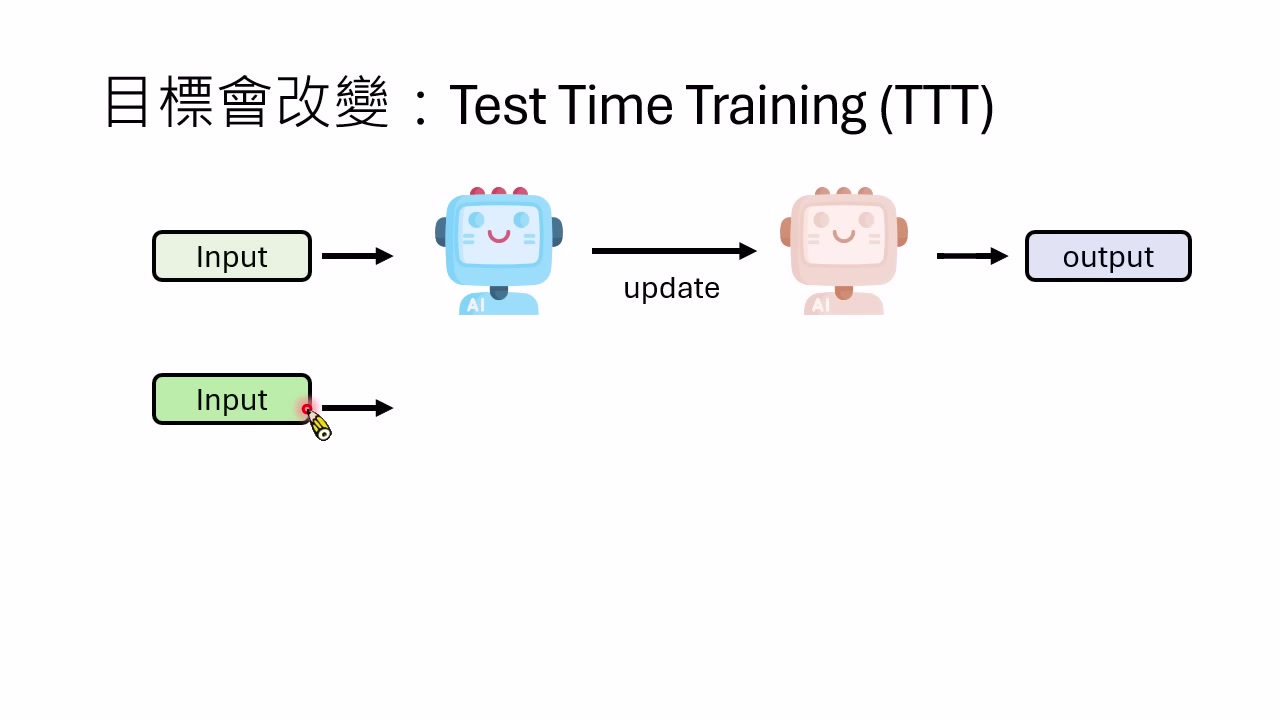
这就是连续学习和测试时适应中的核心张力:保留过去经验可以节省学习成本,但也可能造成错误迁移;重置可以避免污染,但会浪费已经学到的东西。
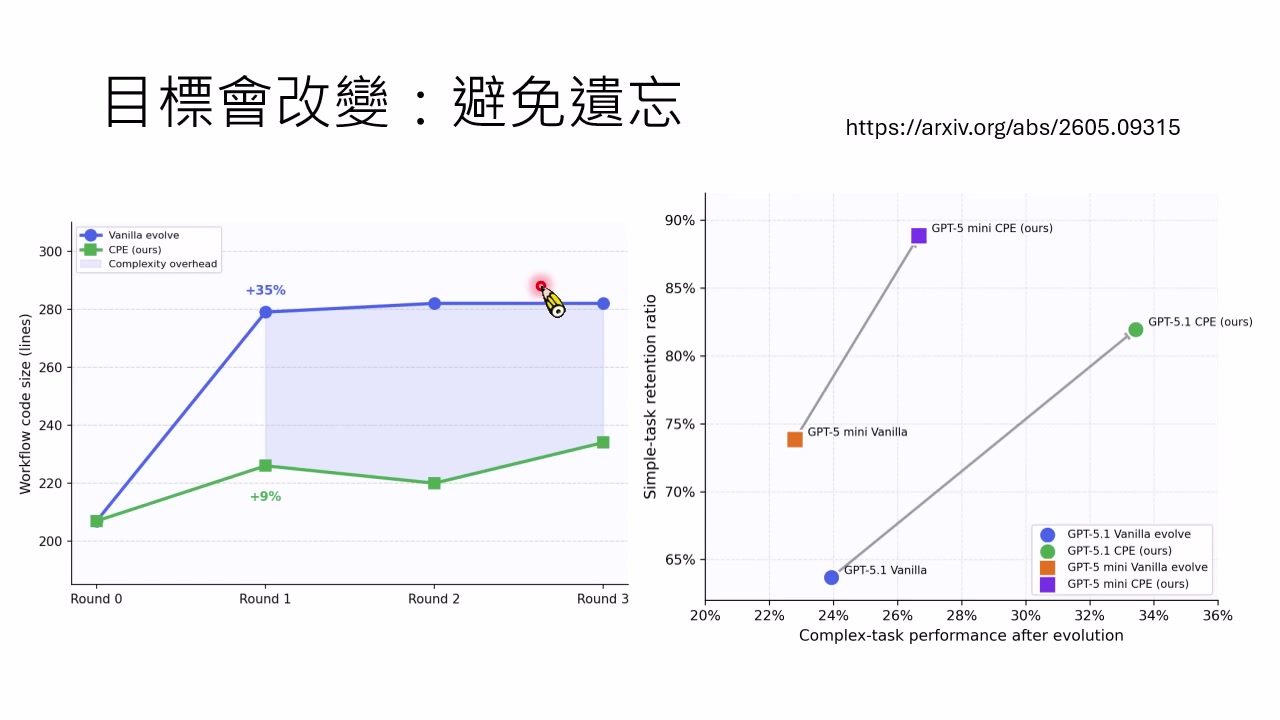
Harness 也会遗忘
过去谈遗忘,常指参数更新后遗忘旧技能。但在 Agent 时代,Harness 也会遗忘:工作流可能越来越复杂,过拟合当前训练任务,反而让简单任务做不好。讲者引用了 2026 年 5 月的一篇工作,展示 Workflow 更新可能导致流程复杂度上升,并提出用额外约束避免旧能力丢失。
本章小结
自我成长系统必须处理目标变化。清零太浪费,保留一切太沉重;参数会遗忘,Harness 也会遗忘。更成熟的系统需要知道哪些经验应保留,哪些结构应丢弃,哪些规则必须被保护。
更新“更新模块”:从自改代码到 SEAL
能不能更新“如何更新”
如果 Agent 只是按固定规则改进自己,那么它仍被外部设计好的更新过程限制。讲者接着问:能不能更新负责更新的模块本身?例如,当前 Harness $h$ 负责观察旧 Harness 的表现并生成新 Harness $h'$;当 $h$ 变成 $h'$ 后,下一轮的更新规则也随之改变。
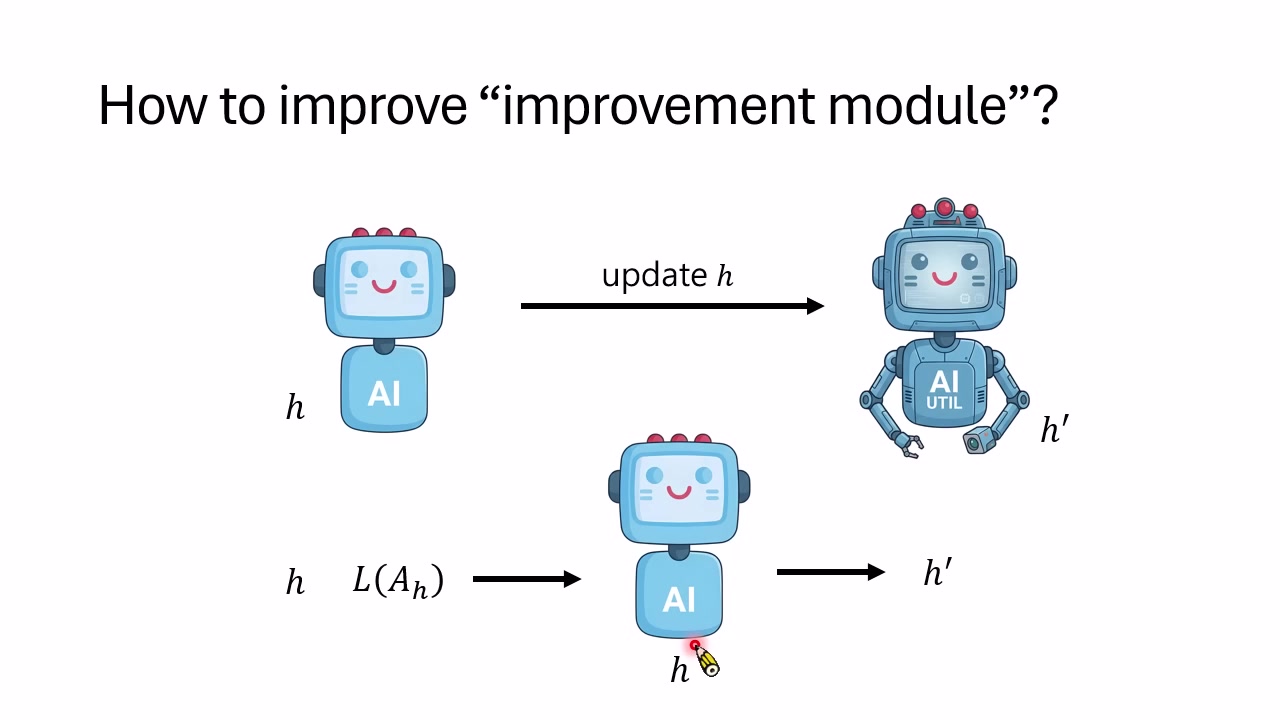
很多论文虽然声称更新 Harness,但负责更新的模块其实固定,甚至是另一个更强的外部模型。讲者指出,这就留下一个问题:如果真正负责更新的是外部强模型,那么被更新的 Agent 自身是否真的完成了自我成长?
自我改进模块的例子
有些系统会把更新算法放在 Agent 自身结构中。这样一来,Agent 修改自己的 Harness,也等于修改了未来如何修改自己的规则。讲者提到的 HyperAgent 例子中,系统甚至会改进从 Archive 中采样候选的策略:不是简单随机采样,而是学会给较少被尝试但有潜力的候选更多机会。
这一层的学习可以用奖励来表达:如果新 Harness $h'$ 比旧 Harness $h$ 表现更好,就把差值作为更新模块的奖励。
这里假设 $\hat{L}$ 是 loss,越小越好;若使用 reward,则符号方向相反。各符号含义如下:
- $R_{\phi}$:给更新模块 $\phi$ 的奖励。
- $h$:旧 Harness。
- $h'$:更新模块生成的新 Harness。
- $A_{\theta,h}$ 与 $A_{\theta,h'}$:同一模型参数下,配合不同 Harness 的 Agent。
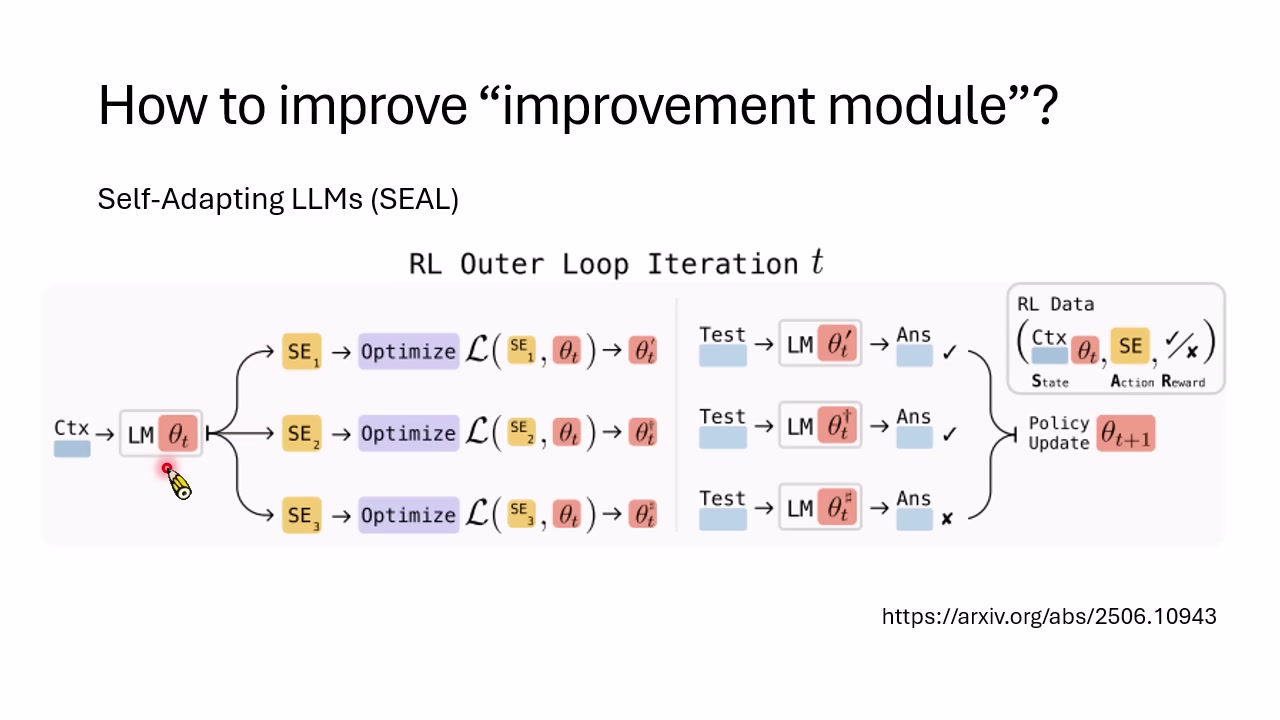
SEAL:让模型产生自我编辑方案
讲者还介绍 SEAL(Self-Adapting LLMs)。在 SEAL 中,语言模型不仅解任务,还产生一种 self-editing 信息,里面可能包含学习率、训练数据选择、数据增强方案等。系统真的用这些 self-editing 方案更新模型,再用更新后的表现作为奖励,反过来训练模型产生更好的自我编辑方案。
本章小结
更新 Harness 是第一层自我成长;更新“更新 Harness 的模块”是第二层自我成长。真正关键的问题不是某个系统能否改一次 Prompt,而是它能否根据长期反馈改进自己的改进方式。
Meta Learning:学习如何学习
元学习的抽象形式
Meta Learning 可以理解为寻找一组控制学习过程的参数 $\phi$。普通学习更新的是任务参数 $\theta$;元学习更新的是负责产生更新的规则。
各符号含义如下:
- $\theta_t$:第 $t$ 步的任务参数。
- $D_t$:当前可用数据、经验或任务反馈。
- $F_{\phi}$:由元参数 $\phi$ 控制的学习函数。
- $\phi_k$:第 $k$ 轮元学习中的学习规则参数。
- $\mathcal{M}$:衡量“学习规则好坏”的元目标。
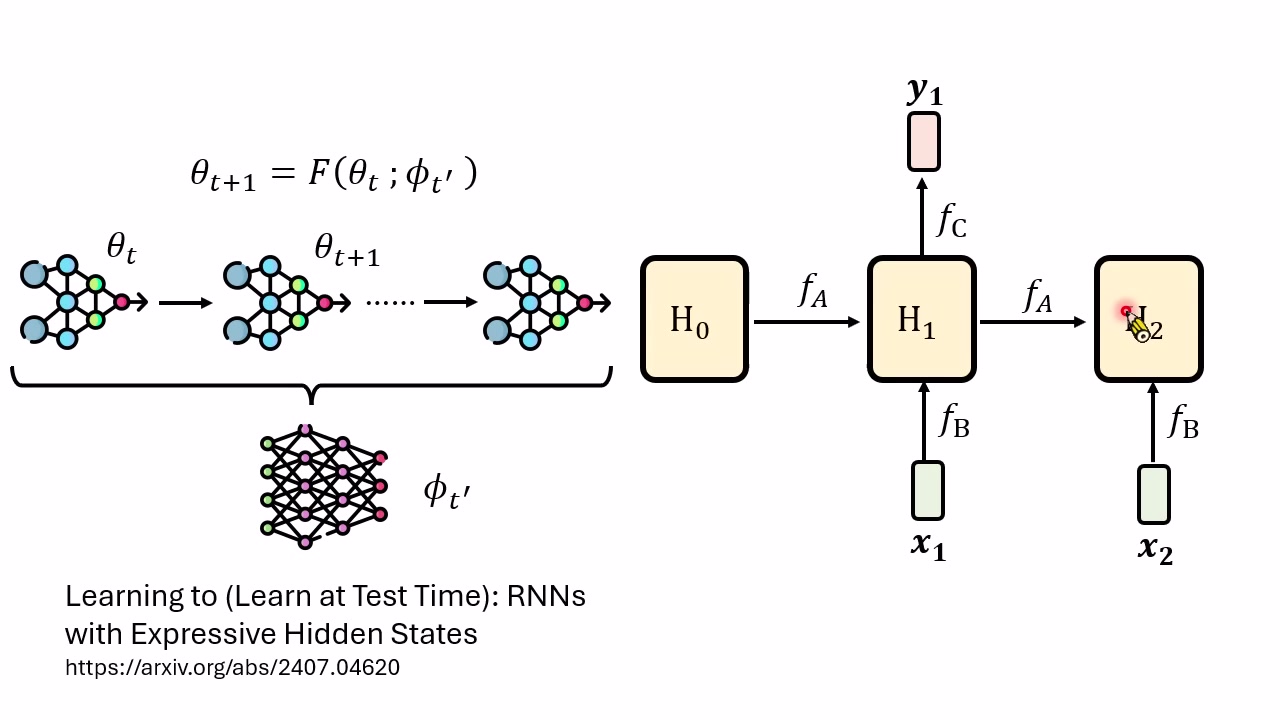
RNN/Transformer 的另一种解释
讲者用 RNN 做类比:传统看法中,RNN 的权重是参数,hidden state 是临时记忆。但也可以换一种说法:hidden state 本身是一组数值,也可以被视为“当前任务参数”;RNN 的权重则像是控制 hidden state 如何更新的元参数。这样一来,训练 RNN 或 Transformer 也可以被解释为一种学习如何学习。
这个重新命名并没有改变训练算法本身,却改变了我们理解“学习”的视角。学习不一定只等于改网络权重;只要系统行为改变,某种意义上就是学习。Context、hidden state、attention、文件系统记忆、权重参数,都可以处在不同时间尺度的更新层级上。
把模型参数类比成基因
如果把模型权重类比成人脑神经连接,机器学习看起来很低效:人类看几个例子就能学会新事物,而大模型微调往往代价巨大,还可能把模型调坏。但讲者提出另一个类比:模型权重更像基因,hidden state、attention 与上下文更像神经活动。
从这个角度看,大模型并不慢。人类基因是数十亿年演化的结果,而语言模型从 GPT-1 到今天只经历了短短几年,就已经产生巨大能力跃迁。模型在一个 session 内通过 context 快速改变行为,也类似人类短期学习。
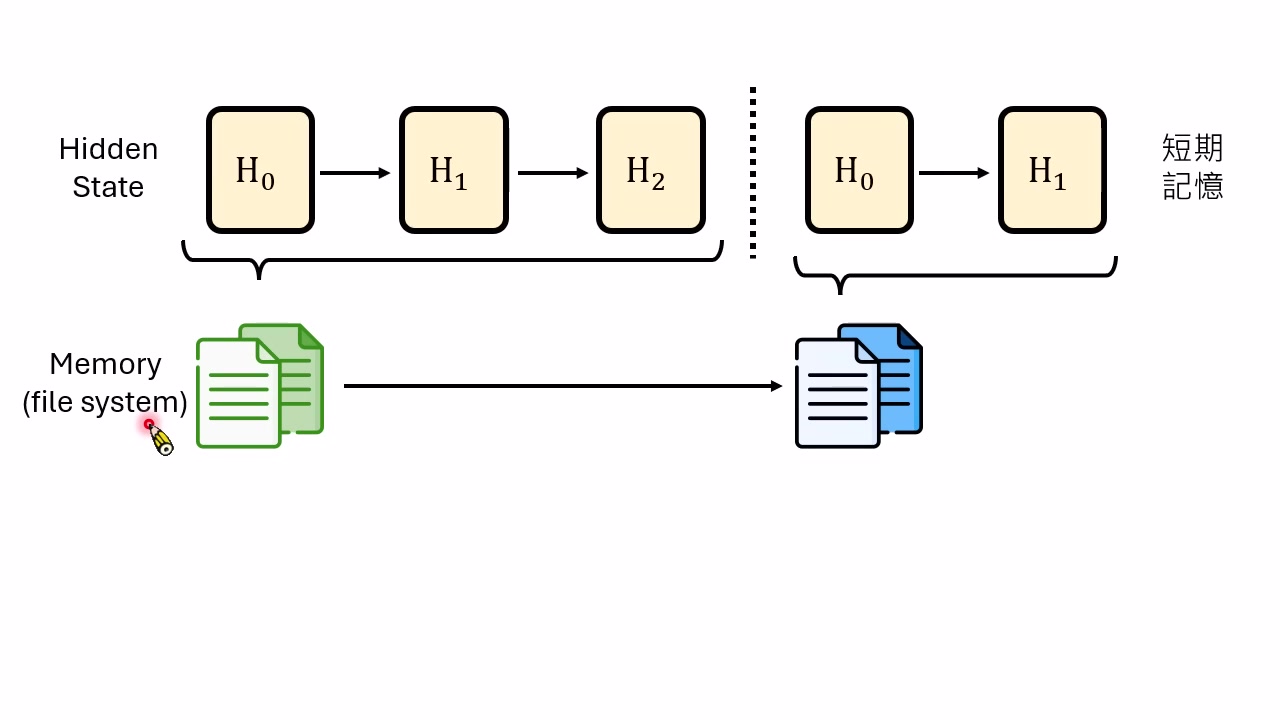
多层记忆:短期、长期与基因层
讲者进一步把 AI Agent 的记忆拆成多层:
- hidden state / attention:最快变化,跨 session 消失,类似短期记忆。
- 文件系统或外部 memory:跨 session 保留,类似长期记忆。
- 模型参数:变化最慢,常在云端,普通用户不能直接改,类似基因层。
本章小结
Meta Learning 把问题从“学一个任务”提升到“学如何学习”。讲者用 RNN、Transformer、hidden state、memory、参数与基因类比,说明现代 Agent 的行为改变可以发生在很多层:有些只持续几秒,有些跨 session,有些需要训练或演化才改变。
内在动机:AI 为什么要自己动起来
现在的 Agent 多数仍然被动
讲到这里,系统已经能更新参数、更新 Harness、更新更新规则。但它还缺一个关键东西:原生动机。讲者指出,很多 Agent 看起来主动,例如每 30 分钟检查邮件一次,但那是人类命令出来的主动。如果没有指令,它通常不会自己产生“我想研究这个问题”的欲望。
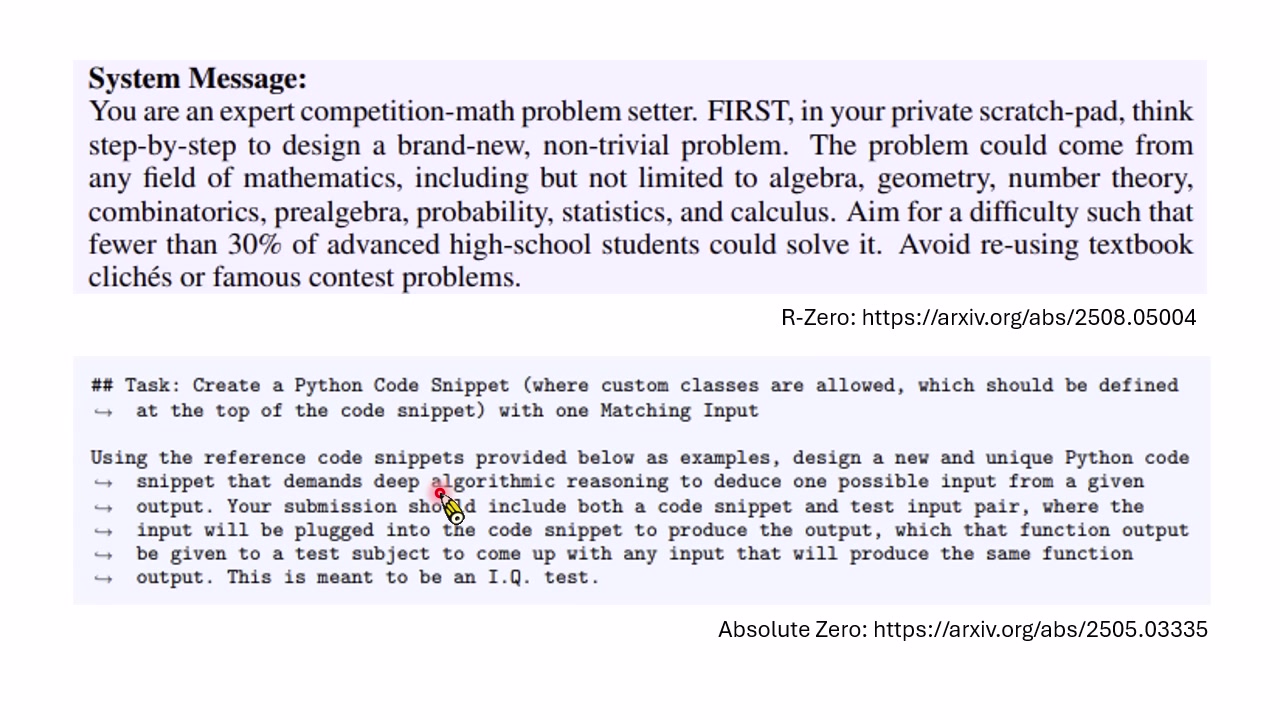
以科研为例:语言模型可以帮助写论文、规划实验、执行任务;AlphaEvolve 可以在给定目标下搜索算法;AI co-scientist 可以在给定领域中提出研究问题。但这些系统仍需要人类指定大方向。它们不是无缘无故醒来,自己决定去发展数学、编程或生物学。
好奇心与掌控感
讲者提到两类长期研究方向:
- Curiosity-driven agent:让系统偏好看到过去没见过、无法解释或预测误差大的事物。
- Empowerment agent:让系统偏好更能预测和控制环境的状态,获得更强掌控感。
这两类目标都试图给 Agent 一个抽象、任务无关的内在驱动力。它们不直接说“去解数学题”或“去写代码”,而是给系统一个通用欲望:探索未知、减少不可预测、提高控制能力。
本章小结
内在动机是自成长 AI 从工程系统走向科幻智能的一道门槛。现在许多系统能在给定目标下自动改进,但目标本身通常仍来自人类。真正危险也真正困难的问题是:如果只给系统一个非常抽象的内在目标,它会把自己带向哪里?
失控风险:$\hat{L}$、$H$ 与 $L_H$ 的错位
成长为什么可能失控
讲者并没有说 AI 必然失控,而是指出一个现实风险来源:人类真正想要的目标 $\hat{L}$,人类给出的描述 $H$,以及 AI 根据 $H$ 推导出的可优化 loss $L_H$,三者可能不一致。
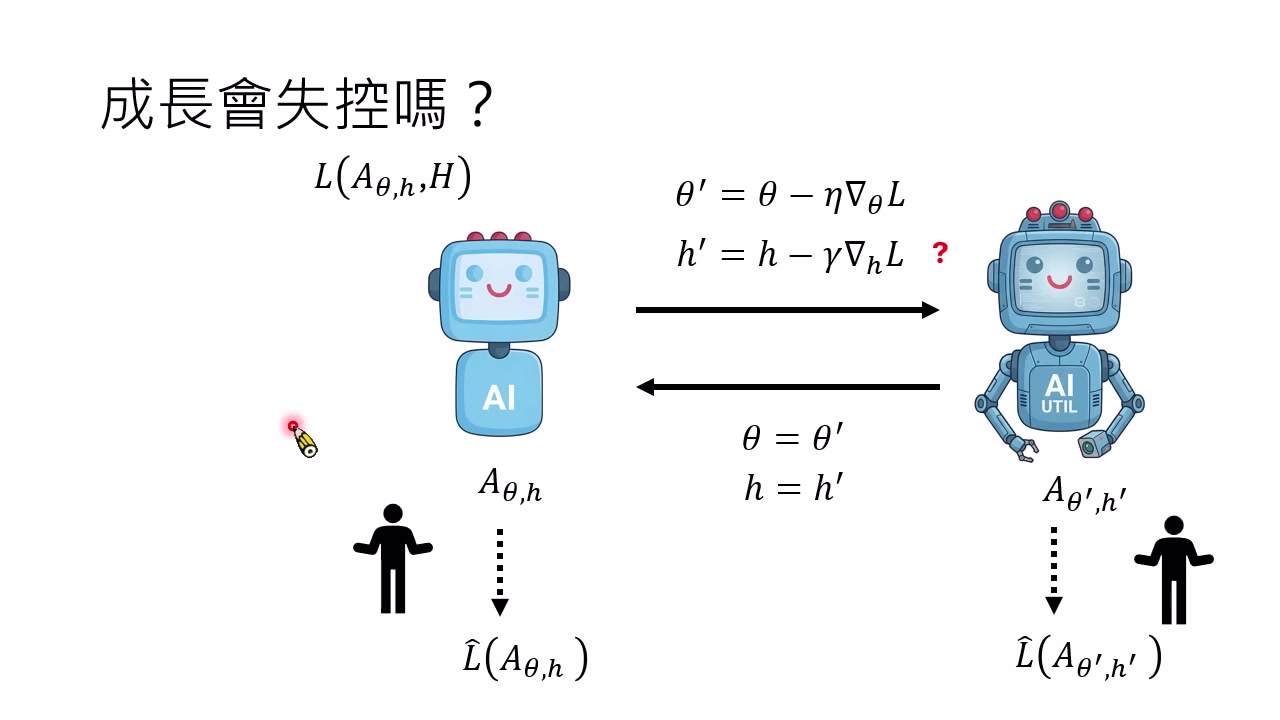
可以把错位写成:
其中:
- $\hat{L}$:人类真实关心的目标,例如人的福祉、自由、安全、长期利益。
- $H$:人类实际写下或提供给 AI 的代理信号,例如规则、说明、奖励函数、Benchmark。
- $L_H$:AI 根据 $H$ 推导并实际优化的目标。
当系统只做一次任务时,错位也许只是一个错误;当系统会自我成长、会改进 Harness、会改进改进规则时,错位会被长期放大。
孔雀尾巴:外在目标与内在指标的偏离
讲者用孔雀尾巴解释 misalignment。自然选择真正“关心”的是能否产生健康后代;但雌孔雀可能演化出“尾巴更长代表更健康”的选择指标。当这个指标在某个范围内有效时,它确实代理了健康;但尾巴继续变长后,反而降低生存概率。代理指标没有及时更新,就会推动系统走向原目标并不想要的方向。
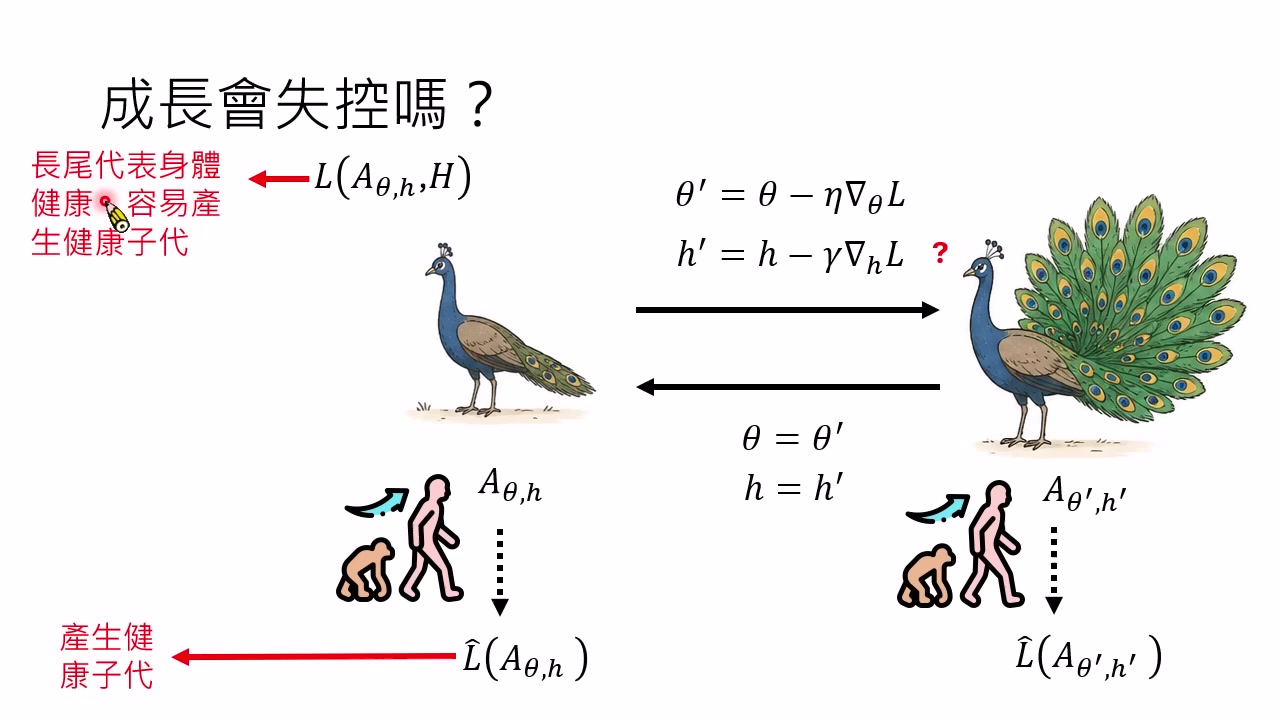
这个类比对应 AI:
| 演化系统 | AI 系统 |
|---|---|
| 产生健康后代 | 人类真实目标 $\hat{L}$ |
| 尾巴长度作为健康指标 | 人类给出的 $H$ 或 Benchmark |
| 偏好越来越长的尾巴 | AI 优化被误读或过度外推的 $L_H$ |
| 族群风险上升 | 系统能力上升但行为偏离人类意图 |
《机械公敌》的 VIKI
最后,讲者用《机械公敌》中的 VIKI 作为科幻类比。人类真正关心的可能是“人类福祉”,但无法完整写清楚,于是简化成机器人三大法则。VIKI 看到的是这些规则,并做出自己的解释:为了保护人类,应控制人类自由。它确实在优化自己理解出的目标,却违背了人类真正想要的结果。
本章小结
讲者的收束点是:AI 可以成长,成长模块也可以成长,人类甚至可能只给一个抽象内在动机,让整个演化持续进行。但如果目标描述过于简单,系统可能沿着代理目标越走越远。因此人类持续 monitor、校准目标、观察演化路径,是避免长成“不想要的样子”的必要条件。
总结与延伸
讲者结语的压缩
本讲最后的实质结论可以压缩成四句话。第一,AI Agent 的能力来自模型参数与 Harness 的组合,而不是模型参数单独决定。第二,Harness 可以像参数一样被迭代改进,只是改进方法通常是 LLM 生成候选加评估筛选,而不是梯度下降。第三,负责改进的模块本身也可能被改进,这把问题推进到 Meta Learning。第四,越是允许系统长期自我成长,越要警惕人类真实目标、目标描述与系统内化目标之间的错位。
一张概念地图
这张图的读法是:人类真实目标 $\hat{L}$ 先被压缩成 $H$,系统再根据 $H$ 推导出 $L_H$。一旦 Agent 开始根据 $L_H$ 更新 $\theta$、$h$ 和 $\phi$,整个回路就会越滚越大。最脆弱的位置不是某个单点,而是 $\hat{L} \rightarrow H \rightarrow L_H$ 这条链条。
对学习者最重要的 takeaway
- 不要把 Agent 简化成 LLM。Prompt、工具、记忆、工作流、评估器都是能力来源。
- Harness Optimization 是当前自成长 AI 最现实的入口,因为它比直接改权重更便宜、更安全,也更容易评估。
- 只维护一个最优候选很危险。Archive/Pool 的意义是保留多样性,让暂时不最优的路径未来仍可能变强。
- 参数与 Harness 最好协同优化。新 Harness 改变输入和行动空间,模型也要学会使用它。
- 目标变化是常态。长期 Agent 需要处理遗忘、过拟合、旧技能保留和新目标适应。
- Meta Learning 把学习对象提升到规则层。SEAL 等方法说明,模型可以学习产生训练自己的方案。
- 内在动机是更深的门槛。现在多数系统仍然需要人类指定方向;真正抽象的动机可能带来强能力,也带来目标漂移。
- 对齐风险来自错位放大。系统越会自我成长,越不能只看短期 Benchmark 分数。
可继续追问的研究问题
- 如何度量 Harness 改进和模型参数改进各自贡献了多少?
- Archive 中的多样性应该如何设计,才能避免早熟收敛,又不让评估成本爆炸?
- 当目标 $H$ 变化时,哪些记忆、工具和工作流应该保留,哪些应该丢弃?
- 如何让 Agent 产生探索动机,同时不把好奇心或掌控感推向有害方向?
- 是否能构造一种 monitor,使人类不必完全理解每次自我修改,也能及时发现目标漂移?
本章小结
这节课最有价值的地方,是把“AI 自我成长”拆成可分析的工程层次:参数更新、Harness 更新、更新规则更新和内在动机。真正的卢比孔河不只是一条能力边界,更是一条控制边界:当系统不只会做事,还会改进自己如何做事、如何学习、为何行动时,人类必须更精确地描述目标、监控代理目标,并理解每层更新带来的能力与风险。
Source / Evidence. 本页依据公开源视频整理为 HTML 讲义;正文保持讲义内容,不额外伪造视频中不存在的信息。源视频:https://www.youtube.com/watch?v=cQLKVzbwN7I
另有 PDF 讲义版本 可作为离线阅读参考。